
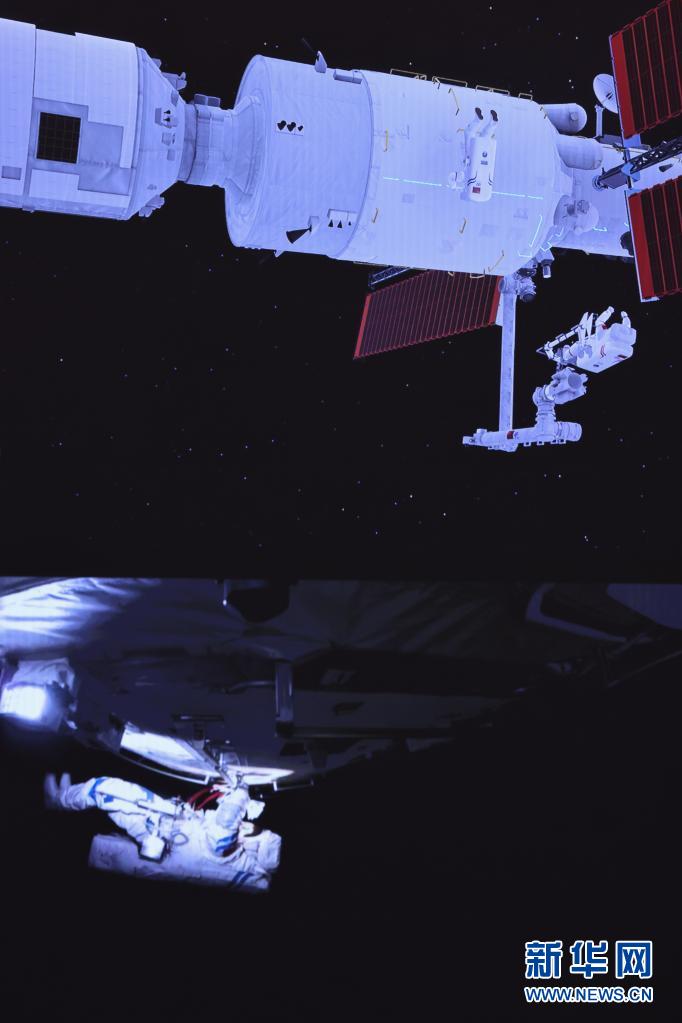
7月4日,在北京航天飞行控制中心大屏拍摄的航天员在舱外工作场面。新华社记者 金立旺 摄
7月4日,经过约7小时的出舱活动,神舟十二号航天员乘组圆满完成出舱活动期间全部既定任务,我国空间站阶段航天员首次出舱活动取得圆满成功。
记者从航天科技集团五院获悉,我国在核心舱机械臂、舱外维修与辅助工具、天地通信系统等领域取得一系列技术突破,为出舱活动顺利实施提供了有力保障。
核心舱机械臂提供有力支撑
此次出舱活动首次检验了航天员与机械臂协同工作的能力,雄伟有力的空间站核心舱机械臂格外引人注目。
空间站核心舱机械臂展开长度为10.2米,最多能承载25吨的重量,是空间站任务中的“大力士”。其肩部设置了3个关节、肘部设置了1个关节、腕部设置了3个关节,每个关节对应1个自由度,具有七自由度的活动能力。
通过各个关节的旋转,空间站核心舱机械臂能够实现自身前后左右任意角度与位置的抓取和操作,为航天员顺利开展出舱任务提供强有力的保证。

这是空间站全景相机拍摄的地球画面(7月4日摄于北京航天飞行控制中心)。新华社记者 金立旺 摄
除支持航天员出舱活动外,空间站核心舱机械臂还承担舱段转位、舱外货物搬运、舱外状态检查、舱外大型设备维护等在轨任务,是目前同类航天产品中复杂度最高、规模最大、控制精度最高的空间智能机械系统。
为扩大任务触及范围,空间站核心舱机械臂还具备“爬行”功能。由于核心舱机械臂采用了“肩3+肘1+腕3”的关节配置方案,肩部和腕部关节配置相同,意味着机械臂两端活动功能是一样的。机械臂通过末端执行器与目标适配器对接与分离,同时配合各关节的联合运动,从而实现在舱体上的爬行转移。
据悉,航天科技集团五院在抓总研制过程中,在关键技术、原材料选用、制造工艺、适应空间站环境的长寿命设计等方面均取得创新突破,全部核心部件实现国产化。
“机械伙伴”协助克服舱外作业困难
航天服手套充压后操作不便、单手操作难度大、在轨防飘要求高……开展舱外作业,航天员面临诸多挑战。作为航天员执行出舱任务的“机械伙伴”,舱外维修与辅助工具可以协助航天员有效克服这些困难。
舱外维修与辅助工具不仅有用于舱外设备维修的舱外电动工具、舱外扳手、通用把手等工具,也有配合航天员舱外姿态稳定及转换的便携式脚限位器、舱外操作台等辅助工具。
——舱外电动工具可以适应舱外复杂的真空和高低温环境,具有定力矩拧紧、拧松的工作模式,并且设置有休眠模式。
——舱外通用把手可以安装到维修设备上,用于航天员在轨维修时进行待维修设备的转移及防漂。
——便携式脚限位器设计了旋转、俯仰、滚转、偏航四个关节自由度,可协助航天员在舱外调整至执行任务的工作姿态;与之配合使用紧密的舱外操作台,可协助航天员进行维修任务时挂放设备和维修工具,解放航天员双手,实现设备或维修工具的临时存放。
——与航天服直接相连的微型工作台,则像一根多功能腰带一样环绕在航天服腰部,将航天员出舱使用的舱外电动工具、舱外通用把手和舱外扳手随身携带,确保航天员随用随取。
此次航天员出舱任务的成功实施,充分验证了舱外维修与辅助工具在轨应用的可靠性,后续将配合航天员完成更多在轨出舱任务,是我国空间站长期在轨运行的有力保障。

7月4日,在北京航天飞行控制中心大屏拍摄的航天员刘伯明出舱场面。新华社记者 金立旺 摄
通信“天路”确保天地通信畅通
开展出舱活动,需要天地间大力协同、舱内外密切配合,与地面建立高速及时的通信联系至关重要。
航天科技集团五院研制的第三代中继终端产品,通过与中继卫星天链一号和天链二号建立中继链路,实现中继通信,确保航天员与地面通信的实时畅通,好比在太空中搭建了地面与中继卫星、中继卫星与航天员之间的“天路”。
与此同时,航天科技集团五院研制的出舱通信子系统可实现舱内外航天员之间、舱内外航天员与地面人员之间,以及舱外航天员之间的全双工语音通信,在航天员舱外活动范围内实现无线通信全覆盖。
与上一代系统相比,该产品具有通信距离更远、通信速率更高、工作寿命更长等特点,同时具有更强的空间环境抗电磁干扰能力,并支持多名航天员同时出舱活动时的通话功能。
此外,舱外图像传输子系统为舱外提供无线网络覆盖,通过出舱无线收发设备提供的“热点”进行图像传输,实现了对航天员出舱活动进行实时显示、实时记录等功能。
新华社记者张泉、胡喆
核心舱机械臂
天地通信系统
发现网登载此文出于传递更多信息之目的,并不意味赞同其观点或证实其描述。文章内容仅供参考,不构成投资建议。投资者据此操作,风险自担。违法、不良信息举报和纠错,及文章配图版权问题均请联系本网,我们将核实后即时删除。



